  
|
Posted By Alex Cooper, Canadian Avalanche Association,
June 10, 2020
|
From volume 105, winter 2013-14
By John G. Woods, Wildvoices Consulting, Revelstoke
On behalf of The Land of Thundering Snow Virtual Exhibit Project
ON OCTOBER 4, 1957, PEOPLE ACROSS CANADA AND AROUND THE WORLD LEARNED THE RUSSIAN WORD “SPUTNIK” WHEN THE SOVIET UNION LAUNCHED THE FIRST MAN-MADE SATELLITE INTO ORBIT. IN RECOGNITION OF THIS MOMENTOUS ACHIEVEMENT, THE NEWLY-ESTABLISHED AVALANCHE SAFETY TEAM WORKING IN ROGERS PASS THAT WINTER NAMED A SLIDEPATH ALONG THE PROPOSED ROUTE OF THE TRANS-CANADA HIGHWAY SPUTNIK 1.
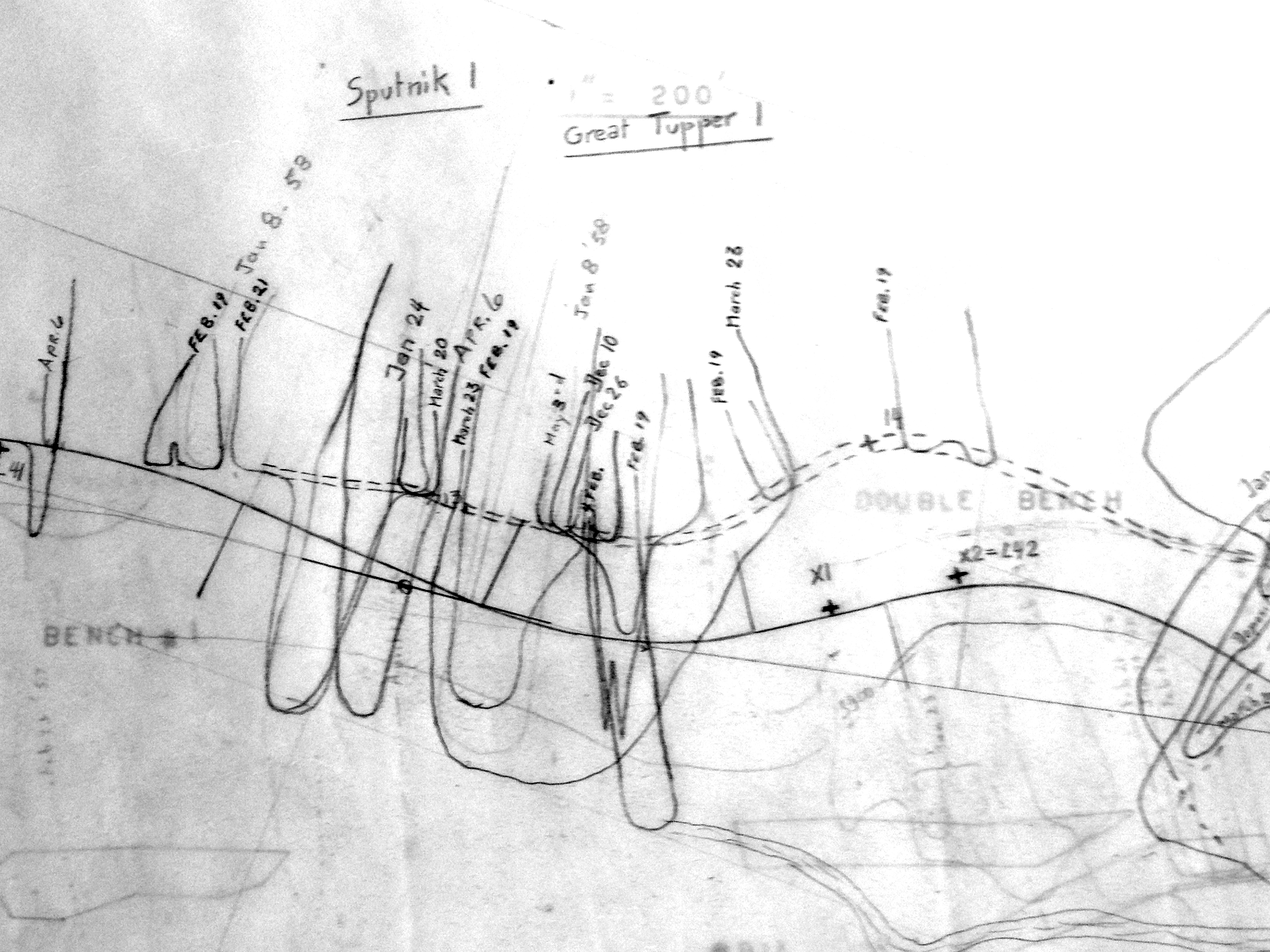
FIG. 1: PLAN (PART) SHOWING AVALANCHE ACTIVITY DURING THE WINTER OF 1957-58 IN ROGERS PASS. NOTE THE ACTIVITY OF “SPUTNIK 1” SLIDEPATH ON JANUARY 8, 1958 // REVELSTOKE MUSEUM AND ARCHIVES
THE TRANS-CANADA Highway was under construction over Rogers Pass at the time and Sputnik 1 appeared on avalanche observation plans of the day (Fig. 1). Since a snowshed was planned for the highway across this slidepath, Sputnik 1 was the name used on the earliest construction documents for Canada’s first snowshed on a public highway.
Peter Schaerer was in charge of the avalanche survey crew that winter and describes the naming process in detail: “The crew of the Department of Public Works who observed avalanches and the weather in Glacier National Park in 1956-1960 was assigning names to the avalanche paths in 1957. The three major avalanche paths at Mount Tupper had been designated as Tupper No.1, No.2, and No.3 (actually, the idea popped up—but was abandoned—to rename them with the first names of the wives and girlfriends of the crew members). Because the name Sputnik was in everybody’s mind, we called the smaller avalanche path west of Tupper 1 “Sputnik No.1” and the path between Tupper 2 and Tupper 3 “Sputnik No.2.” The names were appropriate, because both paths were satellites of larger paths…” (personal communication, Schaerer-Woods, 2013).
The next year, after the United States launched their “Pioneer” rocket towards the Moon, the names of both the slidepath and the snowshed were changed to recognize this North American accomplishment. While the Rogers Pass avalanche atlas still includes the Pioneer slidepath (Schleiss, 1989), more experience during winter operating conditions resulted in connecting Pioneer and Tupper 1 sheds. The combined structure became the shed now called Tupper 1.
Pioneer Shed (a.k.a. Sputnik 1) was chosen as the site for the first snowshed because it was designed to be a relatively short shed—a good project to launch construction on what would become a suite of sheds protecting Rogers Pass’s eastern flank. This proved to be an excellent idea affecting the designs of all the subsequent sheds.
The ARMCO construction company won the contract to build this first shed and decided to use metal culverts supplied in multiple steel plates (Fig. 2). Unfortunately, the backfilling required to provide an even pressure distribution across the plates could not be completed by the first winter, and avalanches moved the structure out of position. The federal Department of Public Works lost confidence in metal designs and all subsequent snowsheds in the Pass were made of concrete (personal communication, Schaerer-Woods, 2013).

FIG. 2: PIONEER (A.K.A. SPUTNIK 1) SNOWSHED UNDER CONSTRUCTION IN 1961 // REVELSTOKE MUSEUM AND ARCHIVES PSS. 67
While the locations and designs of avalanche defences make use of the best available data on historic slide activity, projected traffic volumes, working challenges, and economic realities, nothing can compare with the learning that takes place once the structures are in place. Take for example Lanark Shed, on the Trans-Canada Highway just west of the western boundary of Glacier National Park. On January 1, 1963, slides overwhelmed both entrances to the shed trapping two cars and several people. While everyone was safely rescued after an eight-hour ordeal, this experience resulted in revisions to the shed design. By the following winter, tall concrete containment wings were added above both entrances (Woods, 2010).
In an incident on January 14, 1974, at Single Bench slidepath in Rogers Pass, an avalanche hit the avalanche control team (at the time called SRAWS—Snow Research and Avalanche Warning Section) in Rogers Pass just west of the existing sheds during a control shoot along the highway. Although no one was seriously hurt, the results were spectacular and ominous. A parked semi-transport truck was sent flying through the air, SRAWS and army vehicles were dislodged and damaged, and the 105-mm Howitzer used to initiate the slide was put out of commission (personal communication, Bay-Woods, 2013). Today, Single Bench Shed protects both highway travellers and avalanche control crews at this location.
Canada’s history of studying avalanche terrain and activity along transportation corridors dates from the winter of 1884-85. The Canadian Pacific Railway staffed “snow camps” in and adjacent to Rogers Pass throughout that winter to observe weather and avalanche activity. Their observations were vital to the location and design of the numerous snowsheds that would be needed to allow year-round operation of the railway across the Selkirk and Monashee mountains. In addition to numerous reports to the railway company, one of the survey engineers presented a landmark professional paper on the topic of avalanches and shed design at a meeting of the Canadian Society of Civil Engineers (Cunningham, 1887).
Similar studies of avalanche activity for the potential construction of a highway through Rogers Pass started in the early 1950s (Schaerer, 1995; Webb, 2011). In a tenacious and dedicated career spanning more than five decades as an employee of the National Research Council of Canada and as a private consultant, Peter Schaerer played a key role in locating and identifying design requirements for all nine Canadian highway snowsheds—from Sputnik to the Great Bear.
ACKNOWLEDGEMENTS
I would like to thank Jim Bay, Peter Schaerer and Walter Schleiss for sharing their first-hand experiences related to Canada’s highway snowsheds. Jeff Goodrich of Parks Canada kindly provided access to the unpublished plan showing avalanche activity at Sputnik 1 in 1958. Jacolyn Daniluck of Parks Canada and Cathy English of the Revelstoke Museum and Archives offered valued editorial suggestions on early versions of this article.
SOURCES
Cunningham, G. C. 1887. Snow slides in the Selkirk Mountains Transactions of the Canadian Society of Civil Engineers 1 Pt. 2: p. 18-31.
Schaerer, P. 1995. Avalanche studies Rogers Pass 1956 – 1961. Unpublished.*
Schleiss, V.G. 1989. Rogers Pass Snow Avalanche Atlas Glacier National Park, British Columbia, Canada. Revelstoke, BC, Canadian Parks Service, p. 313
Webb, J.R. 2011. Tales of a Highwayman. J. R. Webb, selfpublished, p. 253*
Woods, J. G. 2010. Snow War: An Illustrated History of Rogers Pass, Glacier National Park, BC.*
* available for viewing at the Revelstoke Museum and Archives
Tags:
avalanche control
history
john woods
snow sheds
Permalink
| Comments (0)
|
|
|
Posted By Alex Cooper, Canadian Avalanche Association,
January 22, 2020
|
From vol. 106, spring 2014
By Paul Cordy

DEPOSIT FROM PATH 19.3 IN KOOTENAY PASS. A SIZE 3 AVALANCHE TRIGGERED BY HELI BOMBING // MOTI
IN THE WORLD OF BIG DATA we have become accustomed to interacting with computer models. The search for good snow inevitably begins by consulting the ensemble weather forecast (the consensus weather prediction of five different detailed models of the atmosphere), just as most searches for knowledge these days begin by consulting Google (a complex and dynamic model of the relevance of digital information). So one might expect that any day now Big Data will begin to spread its tentacles into the world of avalanche safety. But are there particular challenges to using computer models for avalanche prediction? Not the least of these may be thecomplexity of geographic and human factors leading to avalanche formation, and also the scarcity of reliable and continuous information about conditions in the start zones.
So how far have avalanche prediction models come, and how might they benefit organizations and individuals? Will they ever be good enough to rely on in Canada? The British Columbia Ministry of Transportation and Infrastructure (MOTI) has a long history of taking the lead in creating digital tools for avalanche practitioners. These efforts have led to the development of one tool that we know and use already: SnowPro. A lesser-known innovation of the MOTI is the computer-based avalanche forecasting system which began more than 15 years ago in Kootenay Pass. Ted Wieck, former information systems manager for the MOTI avalanche and weather branch, spent over a decade developing the MOTI’s first digital highway, weather, and avalanche database. In the beginning, this meant considerable amounts of tedious data entry for technicians, who would have rather spent more time in the hills and on the road. Ted wanted to make all that data useful to the people who were assiduously collecting it for him, and so he became a fervent supporter of computer-based avalanche prediction.
In the mid-nineties, Dr. David McClung and John Tweedy developed and tested software that used manual weather observations (input by the user, of course) to predict the probability of avalanche activity that day. The prediction was based on a statistical model that was created using historical weather data and avalanche occurrence records from the previous ten seasons at Kootenay Pass. As in all computer models (including Google’s search engine), historic data is used to train the model, or in the case of MOTI, determine the relative importance of various weather variables and how to combine them in a way that computes accurate predictions of avalanches.
This is not too dissimilar to the way that we humans learn. Our experience is combined with training to create mental models of how weather creates avalanches. Often we will compare current weather or snowpack structure with previous seasons’ observations to refine our decisions. The original Kootenay Pass model also retrieved the ten most similar instances of weather and presented the data to the human forecaster to further aid in decision making. In the end, both model approaches were 70-80% accurate. Early in the 2000s, James Floyer proved that similar models could be trained on Bear Pass datasets with similar results.

A CROWN ON PATH 19.8, KOOTENAY PASS // MOTI
As a Masters student with McClung at the University of British Columbia, my contribution to this effort was to dynamically integrate numerical weather forecasts and optimize different versions of the model for each of five different highway corridors with active avalanche control programs. In each place, we used ensemble weather forecasts up to 48 hours ahead into each model, thus extending avalanche predictions into the future (all previous avalanche models predicted present probability of avalanches only). As it happens, predicting avalanches in the future mostly depends on the accuracy of weather forecasting, and most avalanche forecasting models achieve similar accuracy irrespective of the type or complexity of the model.
Of course a 70 to 80% prediction rate is horribly inaccurate given the consequences range from traffic hazard to loss of life, and so there always had to be a human forecaster calling the shots. But before dismissing computer models, one must consider the constraints under which they are working.
Take weather forecasting as an analogy. European weather prediction is far better than that of western North America because of differences in density of meteorological stations. Weather systems en route to Europe are being broadcast by countless sensors in myriad islands and land masses in the Atlantic, not to mention by the North American sensor network. Reliable data makes for more reliable weather models. By contrast, weather on its way to western North America passes over the Pacific Data Void, a vast stretch of ocean almost uninterrupted by islands and permanent weather stations. So the very same computer models are often inaccurate more than 24 hours in advance.
So too with computer models of avalanche prediction. Greater complexity and precision of avalanche models is unlikely to improve forecast accuracy until we provide such models with more and better information. The data that we provide prediction models couldn’t possibly compete with the human experience. Avalanche technicians explore the terrain, doing hand shears and listening to the snow settling under their skis. They feel temperature changes when fronts come through, just like the sensor networks do, but sensors can’t see the sun hit certain start zones, and they can’t see how snow is loading up there. Really, it’s a miracle that numerical prediction algorithms are accurate at all.
Therefore, the next goal was to integrate information about the snowpack into the model. The MOTI avalanche models had a built-in mechanism for updating the avalanche probabilities based on new information. Previously, this "prior" information was added by the forecaster in response to avalanche control results or other knowledge that was not available to the model. Prior probabilities could just as easily come from a model of snowpack structure and stability such as the red flag method of SnowPro, or the SNOWPACK physical model used in Switzerland. Unfortunately, changing funding priorities and personnel at the MOTI meant that snowpack information was never integrated into predictions, although it is still used in Kootenay Pass. It’s up to the next generation take it to another level.

NORTH FORK AVALANCHE AREA ON THE EAST SIDE OF KOOTENAY PASS // MOTI
Generational change itself was also a major driver of interest in creating the model. During the latest bout of modeling studies, MOTI was facing the near-simultaneous retirement of all of their technicians. MOTI saw that new staff might get up to speed more quickly if they could scan the results for the size, type and spatial distribution of natural or controlled avalanches in the historical records. The idea was to try to decouple the memories of seasons from the people who observe them, and help bridge the loss of team experience when seasoned professionals retire. Furthermore, the benefits of such systems would be more apparent to successive generations of technicians who would be ever more native to the digital environment. Whereas the old ironsides of the avalanche patch are more likely to decry that their Rite in the Rain books have never crashed nor printed error messages, younger generations are more likely to wish they could just use their iPhone and store it in the cloud.
Computers can supplement our memories, help us see broad patterns, and evaluate the importance of various causal factors that govern avalanche formation. Snowpack depths and precipitation intensity can be measured by satellite, and soon we’ll have satellites sensing atmospheric structure and conditions over the Pacific Data Void. With more and more wired backcountry users and the Canadian Avalanche Centre’s geo-referenced recreationist observation database, avalanche information is set to explode. Models can help us to synthesize an oversupply of data into relevant knowledge. That knowledge will always be limited by the data and model that generate it, and may always require a human to make life and death decisions. However with changing personnel and changing climate, it helps to maintain historical perspective on present events. Avalanche prediction models can help to bridge present and past, and to help us tease out the most relevant information that can be used to manage risk.
As the analytical techniques of Big Data inexorably penetrate all aspects of life, I expect that one day they will be as much a part of the furniture of our lives as smartphones. However, research and development in avalanche risk modeling advances through the vision, passion and forward thinking of people like John Tweedy and Ted Weick, who championed the initiative within the MOTI. Although my main research focus has shifted from avalanche models to pollution modeling and mitigation, I maintain a deep interest in the topic. As we approach the critical information density with respect to snow and weather, I look forward to collaborating with the next generation of visionaries and institutional champions that will bring the avalanche world back in step with Big Data.
Tags:
avalanche control
avalanche journal
avalanche prediction
kootenay pass
ministry of transportation
modeling
MOTI
Paul Cordy
Permalink
| Comments (0)
|
|
|
Posted By Alex Cooper, Canadian Avalanche Association,
November 13, 2019
|
From volume 108, winter 2014-15
By Steve Brushey

Photo: Because the site was only accessible by helicopter, Quantum Helicopters in Terrace was contracted, providing daily access to the site and slinging of all materials, requiring a total of 75 hours of flying. By Steve Brushey.
APPROXIMATELY 80% OF HIGHWAY avalanche road closures along Highway 16W occur in the 35 Mile avalanche area, located 56.4km west of Terrace. Compounding the problem is restrictive narrow lane width, due to a CN rail track on the south side of the highway and the 35 Mile rock bluff on the north side. Poor sight lines, and lack of a ditch and snow storage add to the 35 Mile problem. This area is also prone to ice fall, resulting in motor vehicle accidents and numerous near misses. Currently the avalanche hazard at 35 Mile is managed through preventative closures and avalanche control, which fall under the Ministry of Transportation and Infrastructure Avalanche Safety Plan. The ice fall hazard remains the responsibility of the maintenance contractor and is mitigated using a high powered rifle with limited success.
During the winter of 2012-13, an increase in ice fall garnered the attention of Ministry representatives. A consultant was hired to find a solution to both the ice fall and avalanche hazard. Thurber Engineering and Dynamic Avalanche Consulting were retained to provide ice fall solutions, rock structure mapping and avalanche fencing design.
The Thurber/Dynamic report’s scope only considered avalanche fencing structures. The study did not include avalanche control products, as the Ministry of Transportation Avalanche and Weather Program preferred a longer term, more permanent solution that would eliminate the need to do control work at the East Bluffs, significantly reduce or eliminate avalanche hazard forecasting, and provide a cost effective solution. Of interest, McElhanney Engineering was retained by a regional project management team, which looked at several high level solutions which included rock cuts, tunnel, causeway and snow shed options. Costs ranged from $37 million to $140 million. Other than the snow shed option, avalanche snow fencing would be required for all of the other options. Avalanche snow fencing made the most sense economically in both the short and long term, given the scope of the initial project.
The MoT Northwest Avalanche Program was concerned about the potential for the snow fences to increase the amount of melt water through melt-freeze cycles, leading to a possible increase in ice fall. In order to further study the potential problem, the Mid-Chutes section of 35 Mile was selected for a trial fencing project. If meltwater or ice fall increased, the likelihood of falling ice impacting the highway would be negligible due to terrain configuration at the Mid-Chutes. In addition, the avalanche hazard at the Mid-Chutes would be mitigated.
During the early spring of 2013, the Northwest Avalanche Program gathered the necessary permits required to proceed with the project. These included archeological and environmental assessments, and a permit to construct a helicopter pad in advance of any required work. During this time, Thurber/Dynamic made site visits to the area to gather information and data required to complete their initial report. This report was finalized in August 2013.
Due to various delays, in the fall of 2013 the project was postponed until 2014. In December 2013, 81.7m of 3.0Dk GeoBrugg Spider Avalanche Fencing arrived in Terrace and was stored for the winter.
In the spring of 2014, the Northwest Avalanche Program began administrating a contract for the installation of the fencing at the Mid-Chutes. Retaining an Engineer of Record for the project did prove to be a challenge, however once finalized, the planning and design of the installation began. This took longer than anticipated. Due to the overall cost estimate, the project now qualified as a Major Works Project and was advertised on BC Bid for qualified installers. The contract closed in early September and the contract was awarded to Pacific Blasting and Demolition of Burnaby, BC. Installation began on September 26 and was completed November 4, 2014.
The installation consisted of several phases involving site preparation and danger tree removal, fence and anchor layout, anchor drilling and grouting, anchor testing, and fence installation. During this time, technical support was provided by Geobrugg, Dynamic Avalanche Consulting and Thurber Engineering. Because the site was only accessible by helicopter, Quantum Helicopters in Terrace was contracted, providing daily access to the site and slinging of all materials, requiring a total of 75 hours of flying. A gravel pit close to the work site was used for the daily mobilization of crew and materials.
Traffic control was required throughout the duration of the project, requiring delays of up to 20 minutes to ensure public safety while Pacific Blasting and Demolition crews performed their work 350m above the highway. During the initial phase of danger tree removal, several track occupancy permits were required from CN Rail in order to safeguard the rail right of way.
Despite a very wet fall, the project was delayed for only three days when crews could not work. This proved testament to the hardy nature of the installation crew and the expert flying of Quantum Helicopter pilots.

Photo: Pacific blasting and demolition crews perform their work
350 metres above the highway. By Steve Brushey.
With the trial phase fencing installation now complete, the fencing will be monitored throughout the winter of 2014-15 to determine the feasibility of the next phase of avalanche fencing for the East Bluff area. The East Bluff phase requires approximately 400m of fencing to complete the main avalanche area. Once complete, the final phase of ice fall hazard mitigation will follow, requiring an ice retaining structure and drape nets. A short, low elevation rock cut is also a possibility.
Moving ahead, the East Bluff start zones of 35 Mile avalanche area face environmental challenges which include nesting birds, bats and goat kidding areas. In addition, archaeological points of interest need to be preserved. The size of the area will also require the construction of another helicopter pad and many more track occupancy permits from CN Rail. An early analysis suggests the work can be completed over two months which if undertaken during the summer months with longer days and technically better weather, should promote efficiencies and cost savings.
Tags:
avalanche control
avalanche fences
avalanche journal
highway 16
ministry of transportation
MOTI
steve brushey
Permalink
| Comments (0)
|
|